https://doi.org/10.1140/epje/s10189-025-00496-1
Regular Article - Living Systems
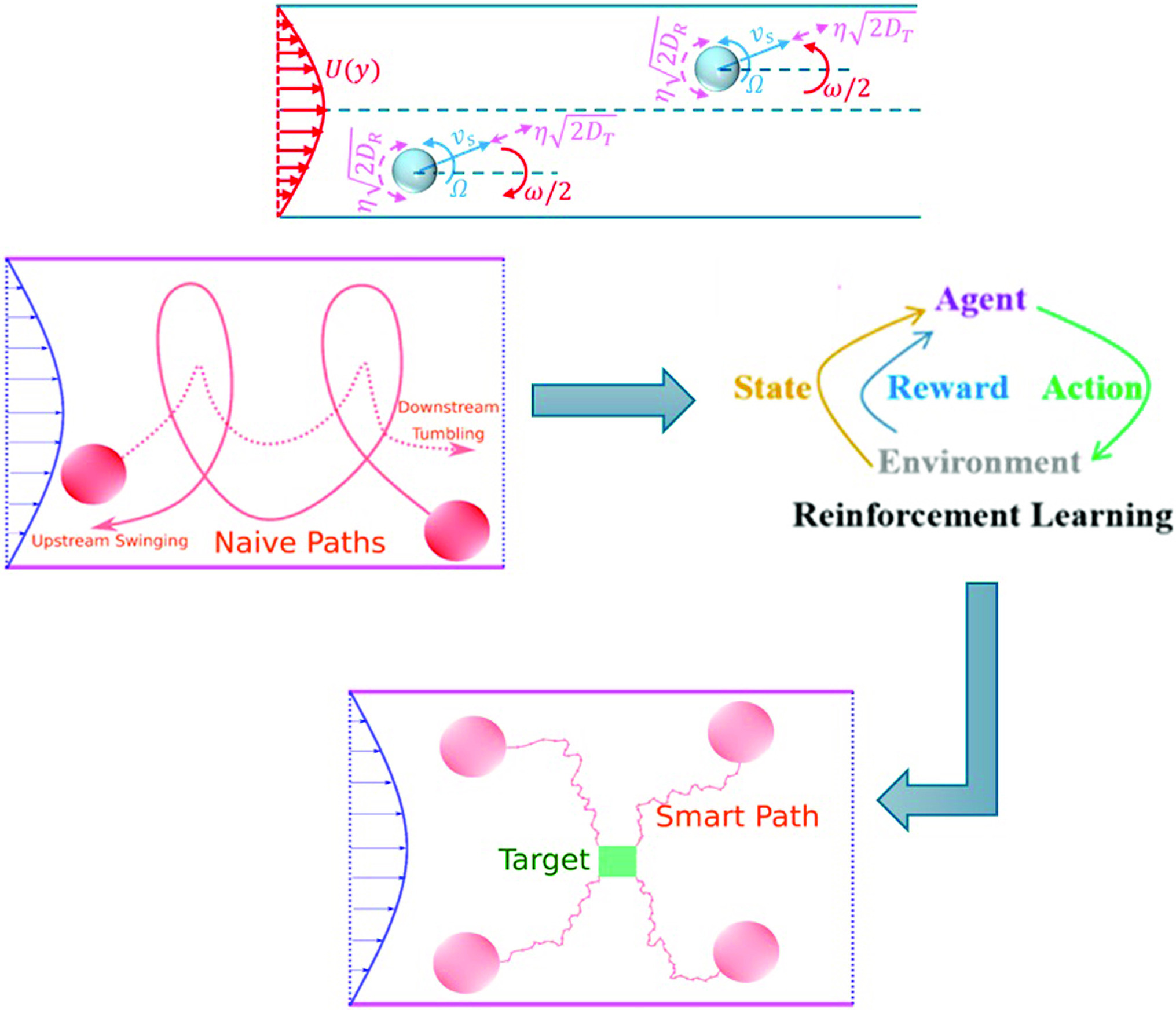
Smart navigation of microswimmers in Poiseuille flow via reinforcement learning
1
Department of Mechanical Engineering, Indian Institute of Science, 560012, Bengaluru, India
2
Department of Artificial Intelligence, Indian Institute of Technology, 721302, Kharagpur, India
Received:
18
February
2025
Accepted:
23
May
2025
Published online:
12
June
2025
Artificial microswimmers, such as active colloids, have the potential to revolutionize targeted drug delivery, but controlling their motion under imposed flow conditions remains challenging. In this work, we implement reinforcement learning (RL) to control the navigation of a microswimmer in a plane Poiseuille flow, with applications in targeted drug delivery. With RL, the swimmer learns to efficiently reach its target by continuously adjusting its swinging or tumbling behavior depending upon its self-propulsion strength, chirality and the imposed flow strength. This RL-based approach enables precise control of the particle’s path, achieving reliable targeting even in stringent scenarios such as upstream motion in high bulk flow, thus advancing the design of intelligent in vivo medical microrobots.
Copyright comment Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
© The Author(s), under exclusive licence to EDP Sciences, SIF and Springer-Verlag GmbH Germany, part of Springer Nature 2025
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.